04 穿越功耗墙,我们该从哪些方面提升“性能”?
04 穿越功耗墙,我们该从哪些方面提升“性能”?
上一讲,在讲 CPU 的性能时,我们提到了这样一个公式:
程序的 CPU 执行时间 = 指令数×CPI×Clock Cycle Time
这么来看,如果要提升计算机的性能,我们可以从指令数、CPI 以及 CPU 主频这三个地方入手。要搞定指令数或者 CPI,乍一看都不太容易。于是,研发 CPU
的硬件工程师们,从 80 年代开始,就挑上了 CPU 这个“软柿子”。在 CPU 上多放一点晶体管,不断提升 CPU 的时钟频率,这样就能让 CPU
变得更快,程序的执行时间就会缩短。
于是,从 1978 年 Intel 发布的 8086 CPU 开始,计算机的主频从 5MHz 开始,不断提升。1980 年代中期的 80386 能够跑到
40MHz,1989 年的 486 能够跑到 100MHz,直到 2000 年的奔腾 4 处理器,主频已经到达了 1.4GHz。而消费者也在这 20
年里养成了“看主频”买电脑的习惯。当时已经基本垄断了桌面 CPU 市场的 Intel 更是夸下了海口,表示奔腾 4 所使用的 CPU 结构可以做到
10GHz,颇有一点“大力出奇迹”的意思。
功耗:CPU 的“人体极限”
然而,计算机科学界从来不相信“大力出奇迹”。奔腾 4 的 CPU 主频从来没有达到过 10GHz,最终它的主频上限定格在
3.8GHz。这还不是最糟的,更糟糕的事情是,大家发现,奔腾 4 的主频虽然高,但是它的实际性能却配不上同样的主频。想要用在笔记本上的奔腾 4 2.4GHz
处理器,其性能只和基于奔腾 3 架构的奔腾 M 1.6GHz 处理器差不多。
于是,这一次的“大力出悲剧”,不仅让 Intel 的对手 AMD 获得了喘息之机,更是代表着“主频时代”的终结。后面几代 Intel CPU
主频不但没有上升,反而下降了。到如今,2019 年的最高配置 Intel i9 CPU,主频也只不过是 5GHz 而已。相较于 1978 年到 2000
年,这 20 年里 300 倍的主频提升,从 2000 年到现在的这 19 年,CPU 的主频大概提高了 3 倍。
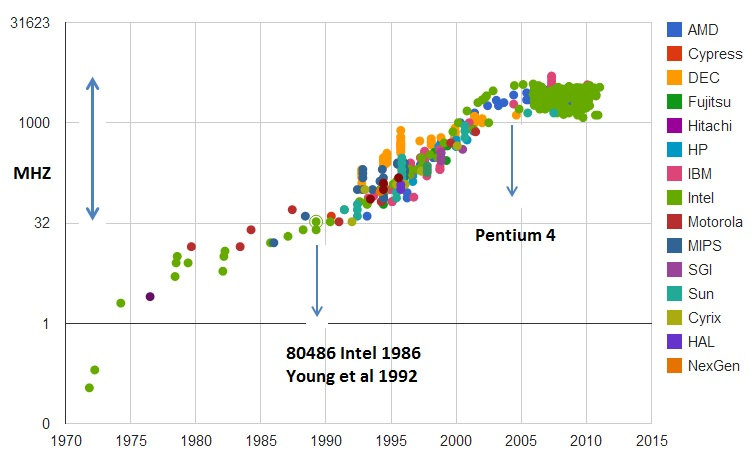
CPU 的主频变化,在奔腾 4
时代进入了瓶颈期,图片来源
奔腾 4 的主频为什么没能超过 3.8GHz 的障碍呢?答案就是功耗问题。什么是功耗问题呢?我们先看一个直观的例子。
一个 3.8GHz 的奔腾 4 处理器,满载功率是 130 瓦。这个 130 瓦是什么概念呢?机场允许带上飞机的充电宝的容量上限是 100
瓦时。如果我们把这个 CPU 安在手机里面,不考虑屏幕内存之类的耗电,这个 CPU 满载运行 45 分钟,充电宝里面就没电了。而 iPhone X 使用
ARM 架构的 CPU,功率则只有 4.5 瓦左右。
我们的 CPU,一般都被叫作 超大规模集成电路 (Very-Large-Scale
Integration,VLSI)。这些电路,实际上都是一个个晶体管组合而成的。CPU
在计算,其实就是让晶体管里面的“开关”不断地去“打开”和“关闭”,来组合完成各种运算和功能。
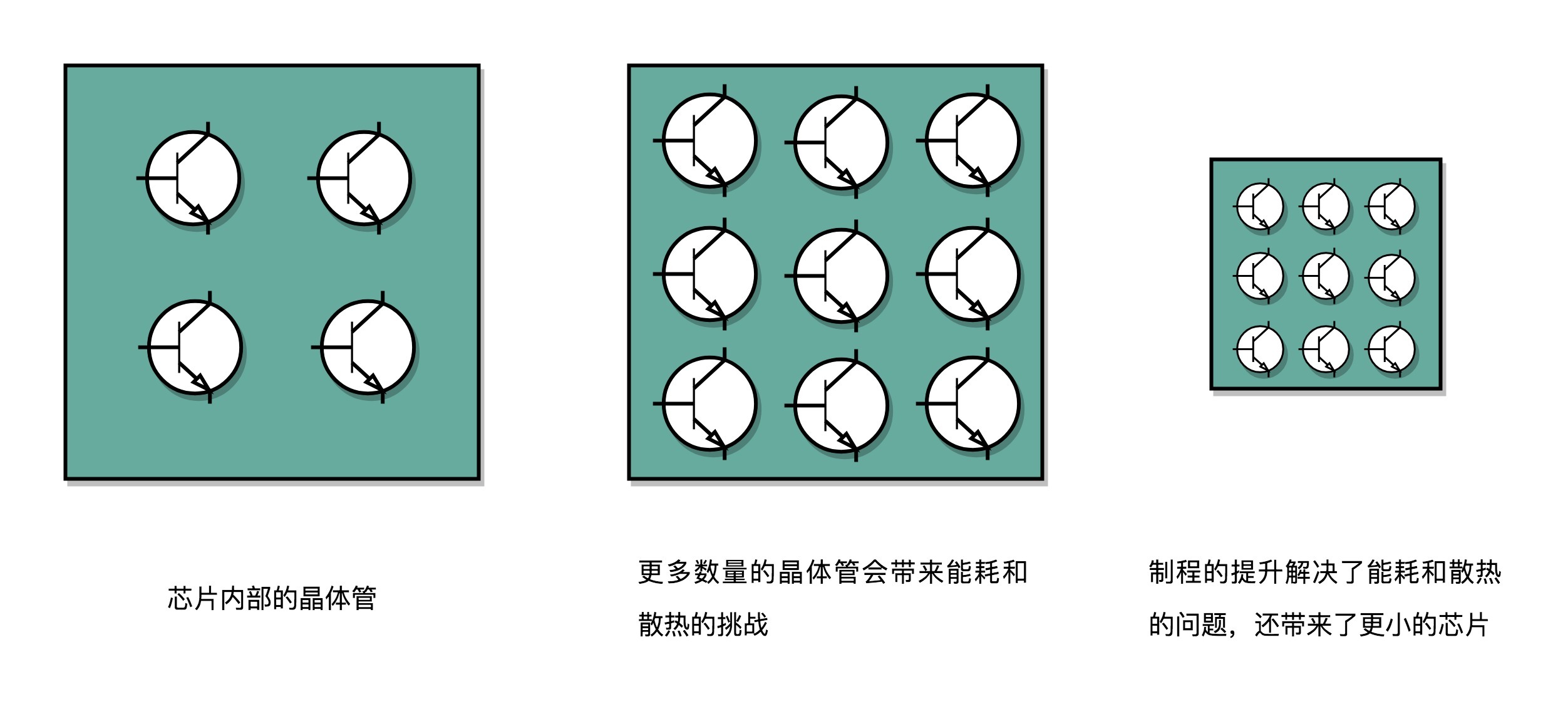
想要计算得快,一方面,我们要在 CPU 里,同样的面积里面,多放一些晶体管,也就是 增加密度
;另一方面,我们要让晶体管“打开”和“关闭”得更快一点,也就是 提升主频 。而这两者,都会增加功耗,带来耗电和散热的问题。
这么说可能还是有点抽象,我还是给你举一个例子。你可以把一个计算机 CPU 想象成一个巨大的工厂,里面有很多工人,相当于 CPU
上面的晶体管,互相之间协同工作。
为了工作得快一点,我们要在工厂里多塞一点人。你可能会问,为什么不把工厂造得大一点呢?这是因为,人和人之间如果离得远了,互相之间走过去需要花的时间就会变长,这也会导致性能下降。这就好像如果
CPU 的面积大,晶体管之间的距离变大,电信号传输的时间就会变长,运算速度自然就慢了。
除了多塞一点人,我们还希望每个人的动作都快一点,这样同样的时间里就可以多干一点活儿了。这就相当于提升 CPU
主频,但是动作快,每个人就要出汗散热。要是太热了,对工厂里面的人来说会中暑生病,对 CPU 来说就会崩溃出错。
我们会在 CPU
上面抹硅脂、装风扇,乃至用上水冷或者其他更好的散热设备,就好像在工厂里面装风扇、空调,发冷饮一样。但是同样的空间下,装上风扇空调能够带来的散热效果也是有极限的。
因此,在 CPU 里面,能够放下的晶体管数量和晶体管的“开关”频率也都是有限的。一个 CPU 的功率,可以用这样一个公式来表示:
功耗 ~= 1/2 ×负载电容×电压的平方×开关频率×晶体管数量
那么,为了要提升性能,我们需要不断地增加晶体管数量。同样的面积下,我们想要多放一点晶体管,就要把晶体管造得小一点。这个就是平时我们所说的提升“制程”。从
28nm 到 7nm,相当于晶体管本身变成了原来的 1/4
大小。这个就相当于我们在工厂里,同样的活儿,我们要找瘦小一点的工人,这样一个工厂里面就可以多一些人。我们还要提升主频,让开关的频率变快,也就是要找手脚更快的工人。
但是,功耗增加太多,就会导致 CPU
散热跟不上,这时,我们就需要降低电压。这里有一点非常关键,在整个功耗的公式里面,功耗和电压的平方是成正比的。这意味着电压下降到原来的
1/5,整个的功耗会变成原来的 1/25。
事实上,从 5MHz 主频的 8086 到 5GHz 主频的 Intel i9,CPU 的电压已经从 5V 左右下降到了 1V 左右。这也是为什么我们
CPU 的主频提升了 1000 倍,但是功耗只增长了 40 倍。比如说,我写这篇文章用的是 Surface
Go,在这样的轻薄笔记本上,微软就是选择了把电压下降到 0.25V 的低电压 CPU,使得笔记本能有更长的续航时间。
并行优化,理解阿姆达尔定律
虽然制程的优化和电压的下降,在过去的 20 年里,让我们的 CPU
性能有所提升。但是从上世纪九十年代到本世纪初,软件工程师们所用的“面向摩尔定律编程”的套路越来越用不下去了。“写程序不考虑性能,等明年 CPU
性能提升一倍,到时候性能自然就不成问题了”,这种想法已经不可行了。
于是,从奔腾 4 开始,Intel 意识到通过提升主频比较“难”去实现性能提升,边开始推出 Core Duo 这样的多核
CPU,通过提升“吞吐率”而不是“响应时间”,来达到目的。
提升响应时间,就好比提升你用的交通工具的速度,比如原本你是开汽车,现在变成了火车乃至飞机。本来开车从上海到北京要 20 个小时,换成飞机就只要 2
个小时了,但是,在此之上,再想要提升速度就不太容易了。我们的 CPU 在奔腾 4 的年代,就好比已经到了飞机这个速度极限。
那你可能要问了,接下来该怎么办呢?相比于给飞机提速,工程师们又想到了新的办法,可以一次同时开 2 架、4 架乃至 8 架飞机,这就好像我们现在用的 2
核、4 核,乃至 8 核的 CPU。
虽然从上海到北京的时间没有变,但是一次飞 8 架飞机能够运的东西自然就变多了,也就是所谓的“吞吐率”变大了。所以,不管你有没有需要,现在 CPU
的性能就是提升了 2 倍乃至 8 倍、16 倍。这也是一个最常见的提升性能的方式, 通过并行提高性能 。
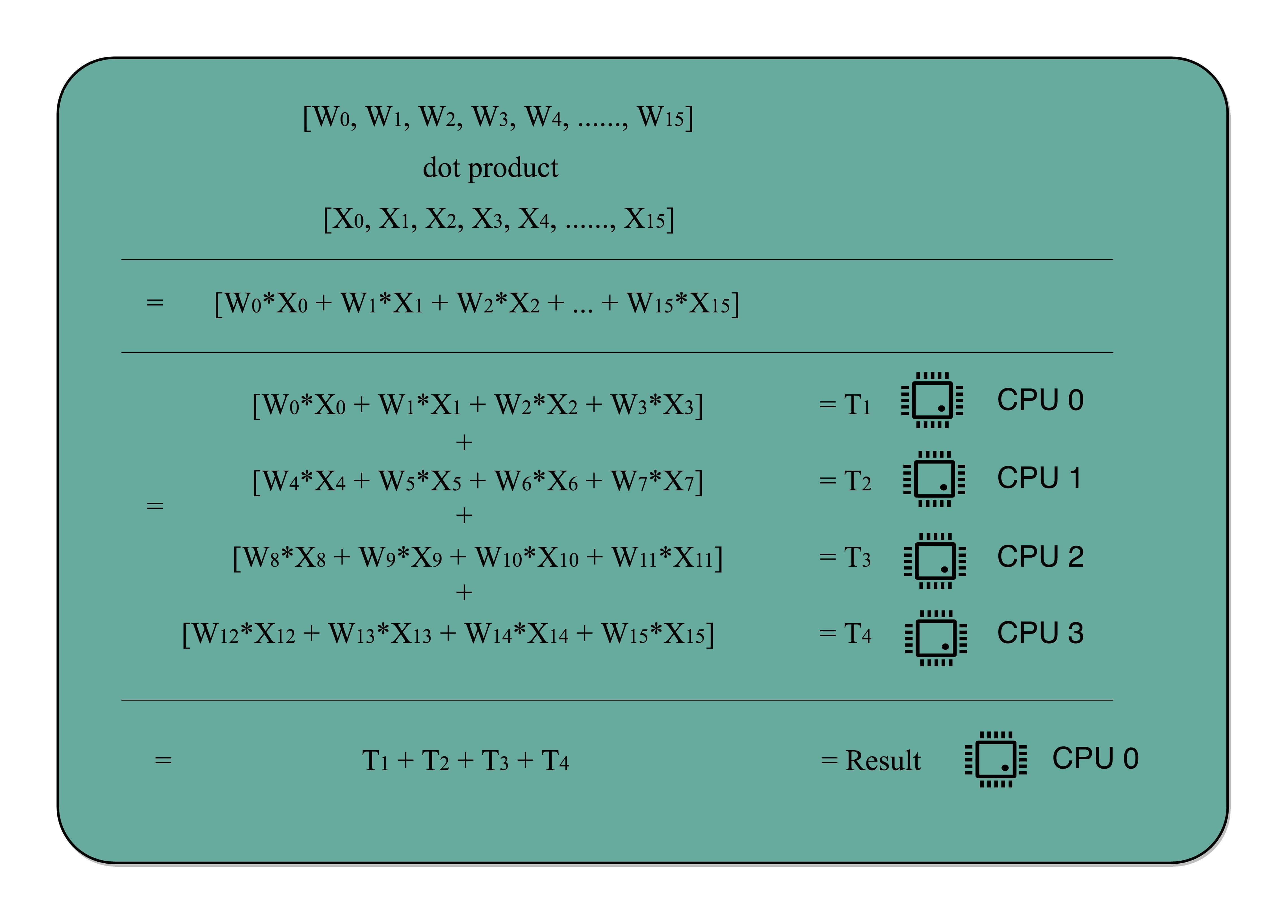
这个思想在很多地方都可以使用。举个例子,我们做机器学习程序的时候,需要计算向量的点积,比如向量
W=[W0,W1,W2,…,W15]W=[W0,W1,W2,…,W15] 和向量
X=[X0,X1,X2,…,X15]X=[X0,X1,X2,…,X15],W⋅X=W0∗X0+W1∗X1+W·X=W0∗X0+W1∗X1+
W2∗X2+…+W15∗X15W2∗X2+…+W15∗X15。这些式子由 16 个乘法和 1 个连加组成。如果你自己一个人用笔来算的话,需要一步一步算 16
次乘法和 15 次加法。如果这个时候我们把这个人物分配给 4 个人,同时去算 W0~W3W0~W3, W4~W7W4~W7, W8~W11W8~W11,
W12~W15W12~W15 这样四个部分的结果,再由一个人进行汇总,需要的时间就会缩短。
但是,并不是所有问题,都可以通过并行提高性能来解决。如果想要使用这种思想,需要满足这样几个条件。
第一,需要进行的计算,本身可以分解成几个可以并行的任务。好比上面的乘法和加法计算,几个人可以同时进行,不会影响最后的结果。
第二,需要能够分解好问题,并确保几个人的结果能够汇总到一起。
第三,在“汇总”这个阶段,是没有办法并行进行的,还是得顺序执行,一步一步来。
这就引出了我们在进行性能优化中,常常用到的一个经验定律, 阿姆达尔定律 (Amdahl’s
Law)。这个定律说的就是,对于一个程序进行优化之后,处理器并行运算之后效率提升的情况。具体可以用这样一个公式来表示:
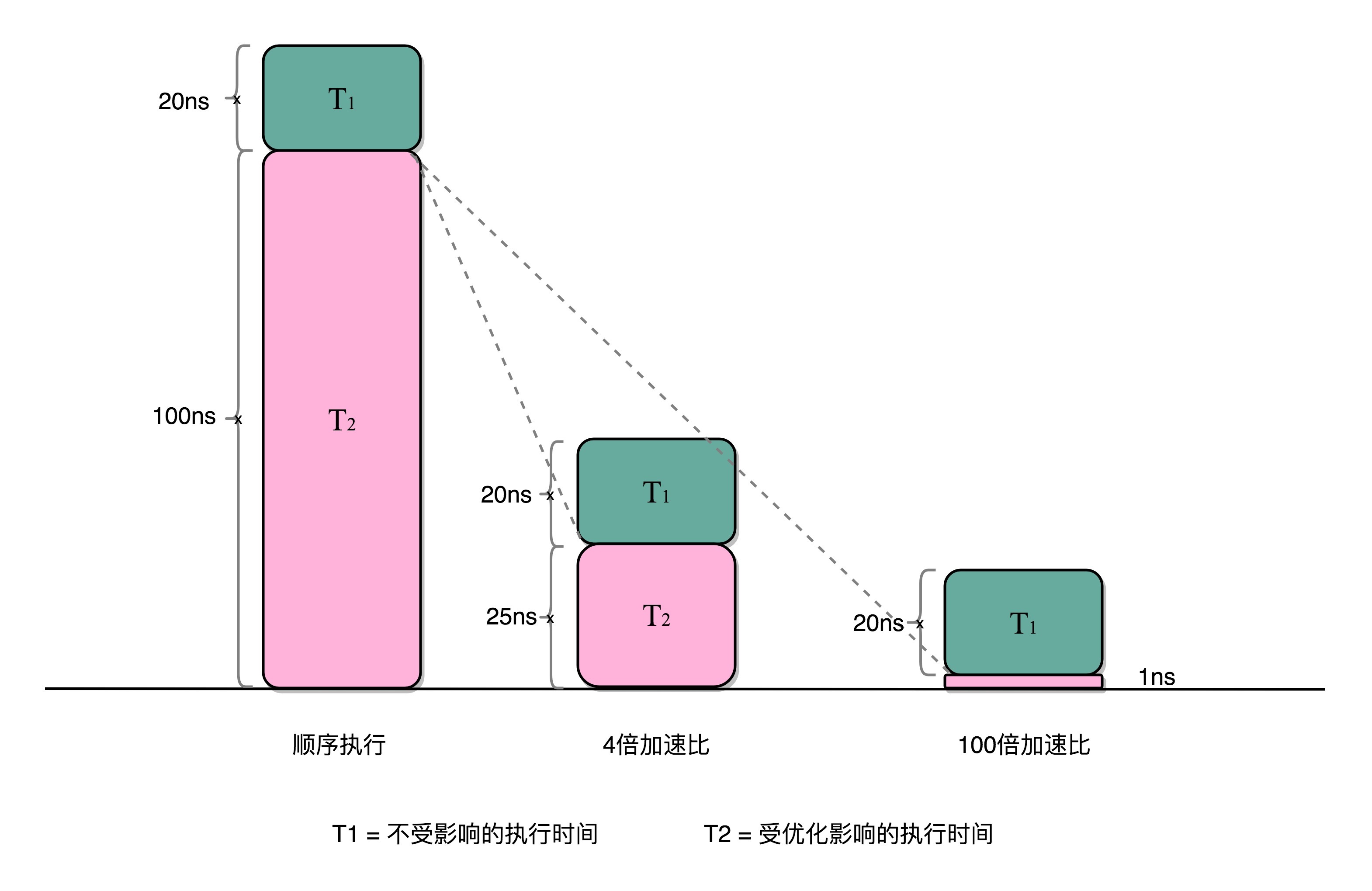
优化后的执行时间 = 受优化影响的执行时间 / 加速倍数 + 不受影响的执行时间
在刚刚的向量点积例子里,4 个人同时计算向量的一小段点积,就是通过并行提高了这部分的计算性能。但是,这 4
个人的计算结果,最终还是要在一个人那里进行汇总相加。这部分汇总相加的时间,是不能通过并行来优化的,也就是上面的公式里面 不受影响的执行时间
这一部分。
比如上面的各个向量的一小段的点积,需要 100ns,加法需要 20ns,总共需要 120ns。这里通过并行 4 个 CPU 有了 4
倍的加速度。那么最终优化后,就有了 100/4+20=45ns。即使我们增加更多的并行度来提供加速倍数,比如有 100 个 CPU,整个时间也需要
100/100+20=21ns。
总结延伸
我们可以看到,无论是简单地通过提升主频,还是增加更多的 CPU
核心数量,通过并行来提升性能,都会遇到相应的瓶颈。仅仅简单地通过“堆硬件”的方式,在今天已经不能很好地满足我们对于程序性能的期望了。于是,工程师们需要从其他方面开始下功夫了。
在“摩尔定律”和“并行计算”之外,在整个计算机组成层面,还有这样几个原则性的性能提升方法。
加速大概率事件 。最典型的就是,过去几年流行的深度学习,整个计算过程中,99% 都是向量和矩阵计算,于是,工程师们通过用 GPU 替代 CPU,大幅度提升了深度学习的模型训练过程。本来一个 CPU 需要跑几小时甚至几天的程序,GPU 只需要几分钟就好了。Google 更是不满足于 GPU 的性能,进一步地推出了 TPU。后面的文章,我也会为你讲解 GPU 和 TPU 的基本构造和原理。
通过流水线提高性能 。现代的工厂里的生产线叫“流水线”。我们可以把装配 iPhone 这样的任务拆分成一个个细分的任务,让每个人都只需要处理一道工序,最大化整个工厂的生产效率。类似的,我们的 CPU 其实就是一个“运算工厂”。我们把 CPU 指令执行的过程进行拆分,细化运行,也是现代 CPU 在主频没有办法提升那么多的情况下,性能仍然可以得到提升的重要原因之一。我们在后面也会讲到,现代 CPU 里是如何通过流水线来提升性能的,以及反面的,过长的流水线会带来什么新的功耗和效率上的负面影响。
通过预测提高性能 。通过预先猜测下一步该干什么,而不是等上一步运行的结果,提前进行运算,也是让程序跑得更快一点的办法。典型的例子就是在一个循环访问数组的时候,凭经验,你也会猜到下一步我们会访问数组的下一项。后面要讲的“分支和冒险”、“局部性原理”这些 CPU 和存储系统设计方法,其实都是在利用我们对于未来的“预测”,提前进行相应的操作,来提升我们的程序性能。
好了,到这里,我们讲完了计算机组成原理这门课的“前情提要”。一方面,整个组成乃至体系结构,都是基于冯·诺依曼架构组成的软硬件一体的解决方案。另一方面,你需要明白的就是,这里面的方方面面的设计和考虑,除了体系结构层面的抽象和通用性之外,核心需要考虑的是“性能”问题。
接下来,我们就要开始深入组成原理,从一个程序的运行讲起,开始我们的“机器指令”之旅。
补充阅读
如果你学有余力,关于本节内容,推荐你阅读下面两本书的对应章节,深入研读。
《计算机组成与设计:软 / 硬件接口》(第 5 版)的 1.7 和 1.10 节,也简单介绍了功耗墙和阿姆达尔定律,你可以拿来细细阅读。
如果你想对阿姆达尔定律有个更细致的了解,《深入理解计算机系统》(第 3 版)的 1.9 节不容错过。